About MTI
The Maryland Tech Invitational(MTI) is an offseason in-person competition based off of the current FTC season. MTI is about the robots! It requires an application with your highest scoring match. It's a competition with the best of the best teams from all over the world!
Learn more at: sites.google.com/view/mdtechinvitational/home
Learn more at: sites.google.com/view/mdtechinvitational/home
Our Robot
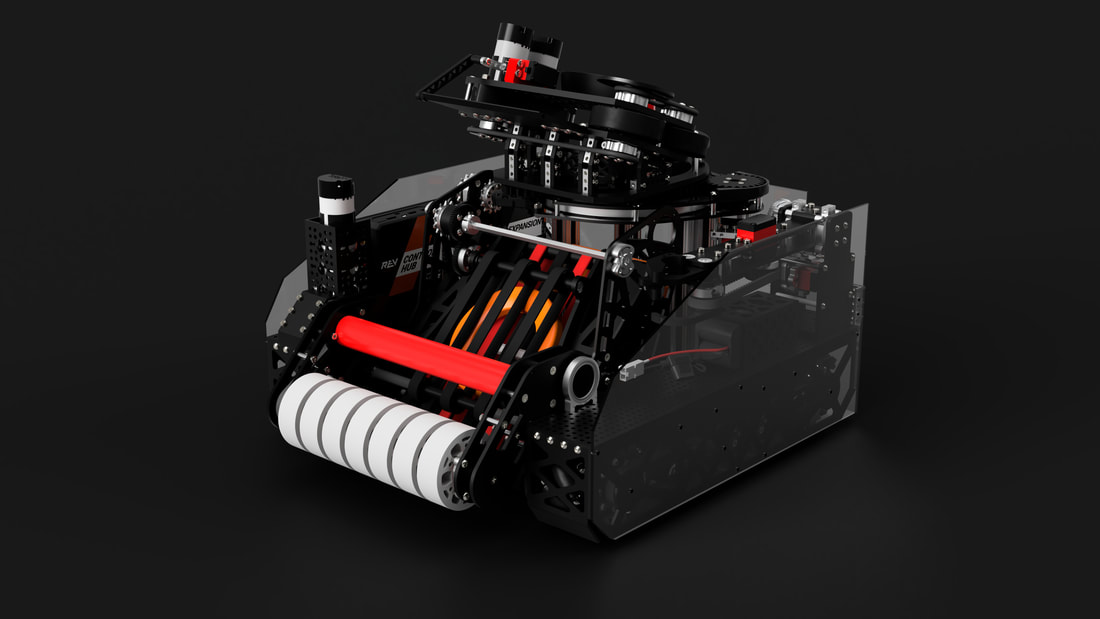
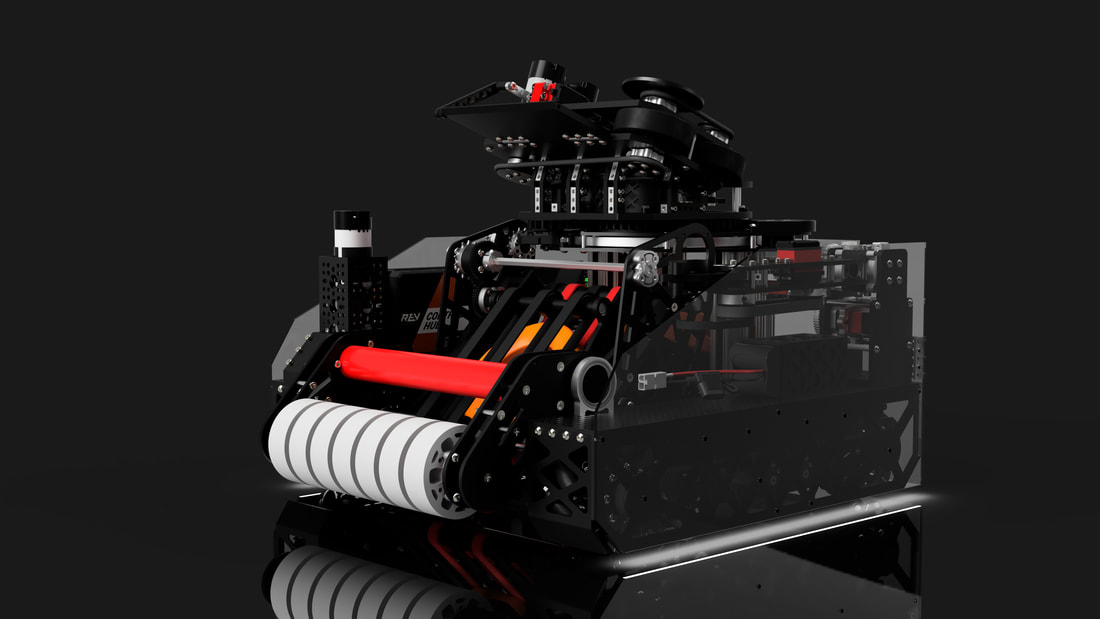
We were accepted into the MTI offseason competition with our 360 point match! Based on our previous in-person competition we knew we needed to make changes to our robot to make it more efficient and reliable. We wanted to make changes to our transfer, mag, turret and shooter.
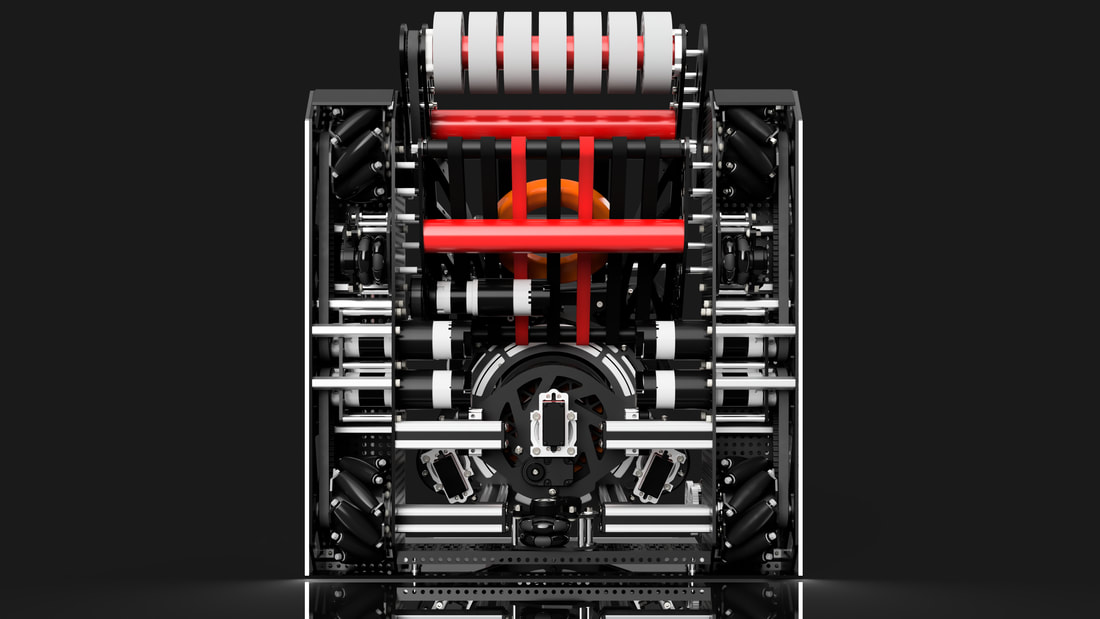
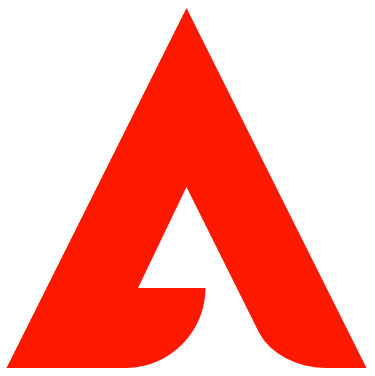
The first thing we wanted to do was add another set of rollers to the conveyor in order to make it faster and less likely to jam. We, however, didn't want to re-cut the conveyor plates, so we had to come up with an innovative way to add the extra rollers. We did this by extending the 3D printed funnels to be able to add an extra shaft onto the funnels. We also used a system of gears, sprockets and round belts to power the top rollers in the opposite direction of the bottom rollers.
Conveyor:
- Added an extra set of rollers
- Ring travel is made faster using the compression of the top and bottom rollers
The first thing we wanted to do was add another set of rollers to the conveyor in order to make it faster and less likely to jam. We, however, didn't want to re-cut the conveyor plates, so we had to come up with an innovative way to add the extra rollers. We did this by extending the 3D printed funnels to be able to add an extra shaft onto the funnels. We also used a system of gears, sprockets and round belts to power the top rollers in the opposite direction of the bottom rollers.
Conveyor:
- Added an extra set of rollers
- Ring travel is made faster using the compression of the top and bottom rollers
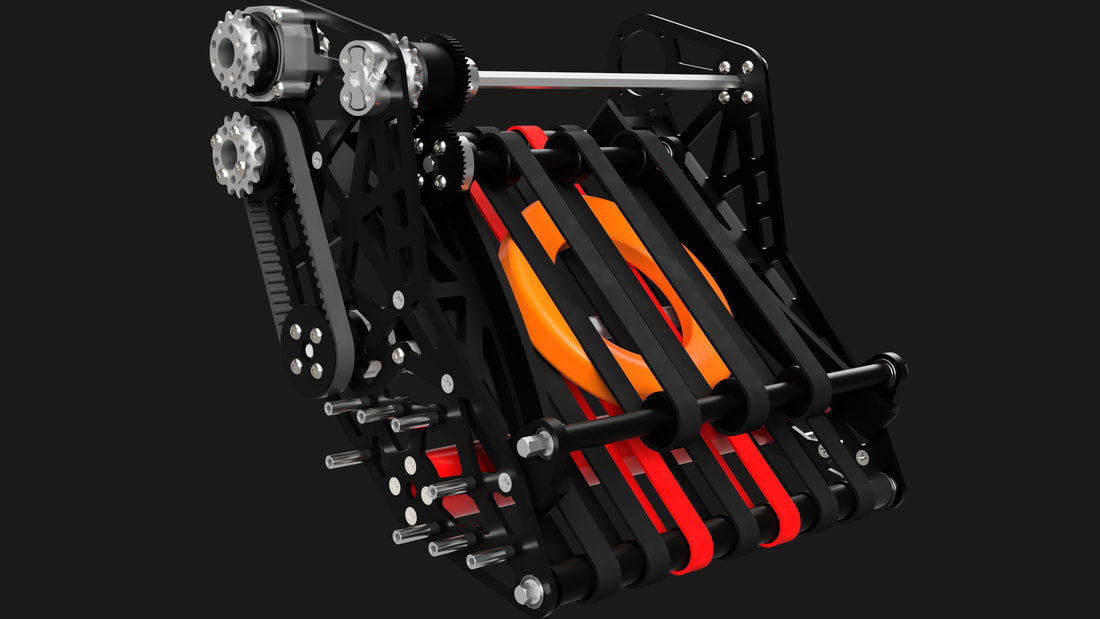

Next, we wanted to change up the structure of the mag. Rather than keeping the ring flat and angling it inside of the shooter, we redesigned it to be at a fixed angle. However by keeping the mag at an angle, the turret looses it ability to turn; so to account for this we mounted the angled mag onto a servo to enable the mag to turn independently of the turret, this way it can be facing forward when intaking rings and then follow the heading of the turret when it gets ready to shoot.
Mag:
- Fixed at 20 degrees on a super speed cr servo
- Geared 1:1 on the encoder
Mag:
- Fixed at 20 degrees on a super speed cr servo
- Geared 1:1 on the encoder
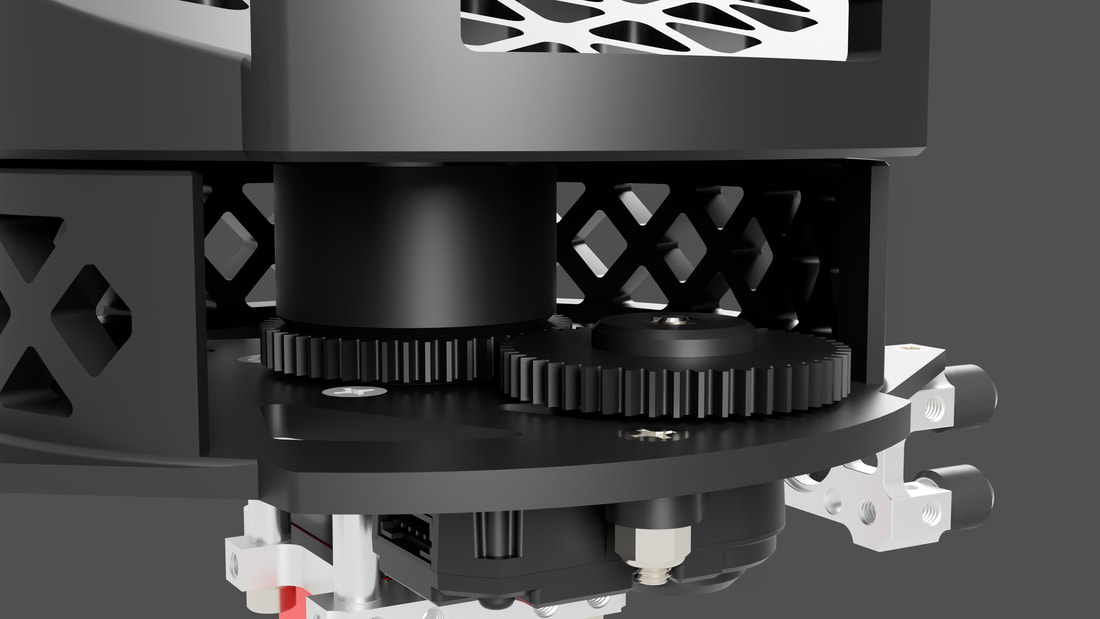
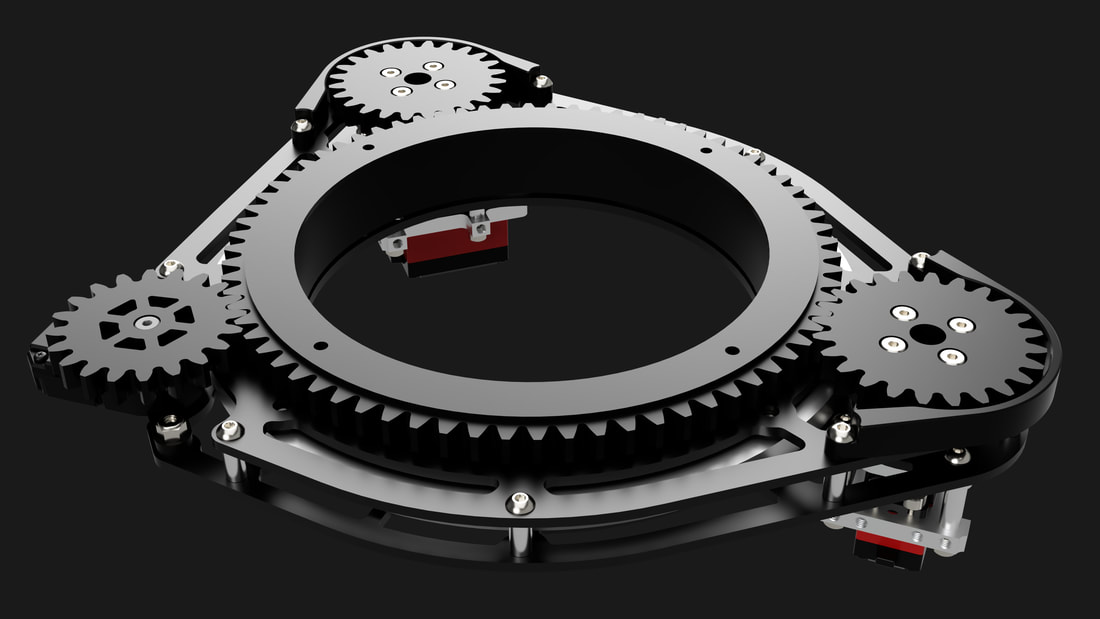
Then, we made slight modifications on the turret so the new mag would be able to pass through the center of the turret. We also got the turret plates cut out of ACM(which is light-weight and strong) from our amazing sponsor SendCutSend. We also switched the 2 35kg CR servos to 2 Gobilda super speed servos.
Turret:
- new ACM material
- switched to speed servos
- increased center hole diameter
Turret:
- new ACM material
- switched to speed servos
- increased center hole diameter

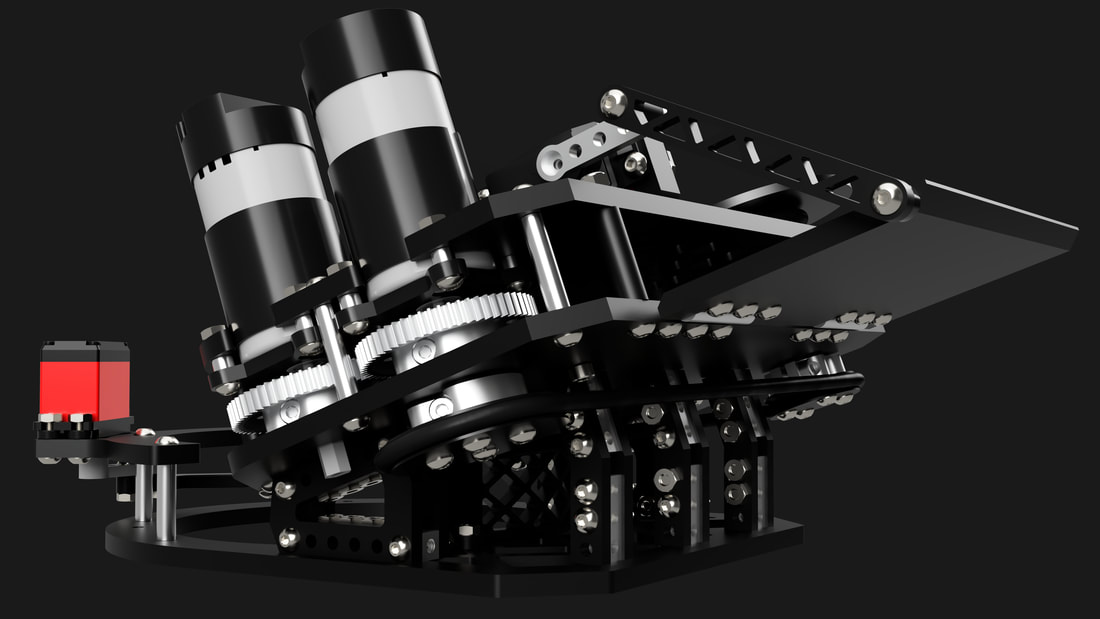
Finally, since the mag is already angled we redesigned the shooter and this time, we designed it as a dual wheel inline shooter. The way an inline shooter works is by having 2 powered wheels in line and a wall on the other side. We are powering the 2 wheels with belt pulleys and gears with a 10500 final max rpm. We also designed an inertia wheel to help preserve the rotation of the wheel during shots of the ring.
Shooter:
- Dual wheel in line shooter
- Fixed at a 20 degree angle
- 10500 final max rpm
- Custom inertia wheel of 73mm diameter
Shooter:
- Dual wheel in line shooter
- Fixed at a 20 degree angle
- 10500 final max rpm
- Custom inertia wheel of 73mm diameter